Как проверить являются ли векторы линейно зависимыми. Линейно зависимые и линейно независимые вектора. Определение линейной независимости системы векторов
Определение 1
. Линейной
комбинацией векторовназывается сумма произведений этих
векторов на скаляры :
:
Определение 2
. Система
векторов называется линейно зависимой системой,
если линейная комбинация их (2.8) обращается
в нуль:
называется линейно зависимой системой,
если линейная комбинация их (2.8) обращается
в нуль:
причем среди чисел существует хотя бы одно, отличное от
нуля.
существует хотя бы одно, отличное от
нуля.
Определение 3
. Векторы называются линейно независимыми, если
их линейная комбинация (2.8) обращается
в нуль лишь в случае, когда все числа.
называются линейно независимыми, если
их линейная комбинация (2.8) обращается
в нуль лишь в случае, когда все числа.
Из этих определений можно получить следующие следствия.
Следствие 1 . В линейно зависимой системе векторов хотя бы один вектор может быть выражен как линейная комбинация остальных.
Доказательство
. Пусть
выполнено (2.9) и пусть для определенности,
коэффициент .
Имеем тогда:
.
Имеем тогда: .
Заметим, что справедливо и обратное
утверждение.
.
Заметим, что справедливо и обратное
утверждение.
Следствие 2.
Если система
векторов содержит нулевой вектор, то эта система
(обязательно) линейно зависима –
доказательство очевидно.
содержит нулевой вектор, то эта система
(обязательно) линейно зависима –
доказательство очевидно.
Следствие 3
. Если средиn
векторов какие либоk
(
какие либоk
( )
векторов линейно зависимы, то и всеn
векторов линейно зависимы (опустим
доказательство).
)
векторов линейно зависимы, то и всеn
векторов линейно зависимы (опустим
доказательство).
2 0 . Линейные комбинации двух, трех и четырех векторов . Рассмотрим вопросы линейной зависимости и независимости векторов на прямой, плоскости и в пространстве. Приведем соответствующие теоремы.
Теорема 1 . Для того чтобы два вектора были линейно зависимы, необходимо и достаточно, чтобы они были коллинеарны.
Необходимость
. Пусть векторы и
и линейно зависимы. Это означает, что их
линейная комбинация
линейно зависимы. Это означает, что их
линейная комбинация =0
и (ради определенности)
=0
и (ради определенности) .
Отсюда следует равенство
.
Отсюда следует равенство ,
и (по определению умножения вектора на
число) векторы
,
и (по определению умножения вектора на
число) векторы и
и коллинеарны.
коллинеарны.
Достаточность
. Пусть векторы и
и коллинеарны (
коллинеарны ( ║
║ )
(предполагаем, что они отличны от нулевого
вектора; иначе их линейная зависимость
очевидна).
)
(предполагаем, что они отличны от нулевого
вектора; иначе их линейная зависимость
очевидна).
По теореме (2.7)
(см. §2.1,п.2 0) тогда такое, что
такое, что ,
или
,
или – линейная комбинация равна нулю, причем
коэффициент при
– линейная комбинация равна нулю, причем
коэффициент при равен 1 – векторы
равен 1 – векторы и
и линейно зависимы.
линейно зависимы.
Из этой теоремы вытекает следующее следствие.
Следствие
. Если векторы и
и не коллинеарны, то они линейно независимы.
не коллинеарны, то они линейно независимы.
Теорема 2 . Для того чтобы три вектора были линейно зависимы, необходимо и достаточно, чтобы они были компланарны.
Необходимость
. Пусть векторы ,
, и
и линейно зависимы. Покажем, что они
компланарны.
линейно зависимы. Покажем, что они
компланарны.
Из определения
линейной зависимости векторов следует
существование чисел
 и
и таких, что линейная комбинация
таких, что линейная комбинация ,
и при этом (для определенности)
,
и при этом (для определенности) .
Тогда из этого равенства можно выразить
вектор
.
Тогда из этого равенства можно выразить
вектор :
: =
= ,
то есть вектор
,
то есть вектор равен диагонали параллелограмма,
построенного на векторах, стоящих в
правой части этого равенства (рис.2.6).
Это означает, что векторы
равен диагонали параллелограмма,
построенного на векторах, стоящих в
правой части этого равенства (рис.2.6).
Это означает, что векторы ,
, и
и лежат в одной плоскости.
лежат в одной плоскости.
Достаточность
. Пусть векторы ,
, и
и компланарны. Покажем, что они линейно
зависимы.
компланарны. Покажем, что они линейно
зависимы.
Исключим случай коллинеарности какой либо пары векторов (ибо тогда эта пара линейно зависима и по следствию 3 (см.п.1 0) все три вектора линейно зависимы). Заметим, что такое предположение исключает также существование нулевого вектора среди указанных трех.
Перенесем три компланарных
вектора в одну плоскость и приведем их
к общему началу. Через конец вектора
 проведем прямые, параллельные векторам
проведем прямые, параллельные векторам и
и ;
получим при этом векторы
;
получим при этом векторы и
и (рис.2.7) – их существование обеспечено
тем, что векторы
(рис.2.7) – их существование обеспечено
тем, что векторы и
и не коллинеарные по предположению
векторы. Отсюда следует, что вектор
не коллинеарные по предположению
векторы. Отсюда следует, что вектор =
= +
+ .
Переписав это равенство в виде
(–1)
.
Переписав это равенство в виде
(–1) +
+ +
+ =0,
заключаем, что векторы
=0,
заключаем, что векторы ,
, и
и линейно зависимы.
линейно зависимы.
Из доказанной теоремы вытекает два следствия.
Следствие 1
. Пусть и
и не коллинеарные векторы, вектор
не коллинеарные векторы, вектор – произвольный, лежащий в плоскости,
определяемой векторами
– произвольный, лежащий в плоскости,
определяемой векторами и
и ,
вектор. Существуют тогда числа
,
вектор. Существуют тогда числа и
и такие, что
такие, что
 =
= +
+ .
(2.10)
.
(2.10)
Следствие 2
. Если векторы ,
, и
и не компланарны, то они линейно независимы.
не компланарны, то они линейно независимы.
Теорема 3 . Любые четыре вектора линейно зависимы.
Доказательство опустим; с некоторыми изменениями оно копирует доказательство теоремы 2. Приведем следствие из этой теоремы.
Следствие
. Для любых
некомпланарных векторов ,
, ,
, и любого вектора
и любого вектора и
и такие, что
такие, что
 .
(2.11)
.
(2.11)
Замечание . Для векторов в (трехмерном) пространстве понятия линейной зависимости и независимости имеют, как это следует из приведенных выше теорем 1-3, простой геометрический смысл.
Пусть имеются два линейно
зависимых вектора
 и
и .
В таком случае один из них является
линейной комбинацией второго, то есть
просто отличается от него численным
множителем (например,
.
В таком случае один из них является
линейной комбинацией второго, то есть
просто отличается от него численным
множителем (например, ).
Геометрически это означает, что оба
вектора находятся на общей прямой; они
могут иметь одинаковое или противоположное
направления (рис.2.8 хх).
).
Геометрически это означает, что оба
вектора находятся на общей прямой; они
могут иметь одинаковое или противоположное
направления (рис.2.8 хх).
Если же два вектора расположены
под углом друг к другу (рис.2.9 хх), то в
этом случае нельзя получить один из них
умножением другого на число – такие
векторы линейно независимы. Следовательно,
линейная независимость двух векторов
 и
и означает, что эти векторы не могут быть
уложены на одну прямую.
означает, что эти векторы не могут быть
уложены на одну прямую.
Выясним геометрический смысл линейной зависимости и независимости трех векторов.
Пусть векторы
 ,
, и
и линейно зависимы и пусть (для определенности)
вектор
линейно зависимы и пусть (для определенности)
вектор является линейной комбинацией векторов
является линейной комбинацией векторов и
и ,
то есть расположен в плоскости, содержащей
векторы
,
то есть расположен в плоскости, содержащей
векторы и
и .
Это означает, что векторы
.
Это означает, что векторы ,
, и
и лежат в одной плоскости. Справедливо и
обратное утверждение: если векторы
лежат в одной плоскости. Справедливо и
обратное утверждение: если векторы ,
, и
и лежат в одной плоскости, то они линейно
зависимы.
лежат в одной плоскости, то они линейно
зависимы.
Таким образом,
векторы
 ,
, и
и линейно независимы в том и только в том
случае, если они не лежат в одной
плоскости.
линейно независимы в том и только в том
случае, если они не лежат в одной
плоскости.
3 0 . Понятие базиса . Одним из важнейших понятий линейной и векторной алгебры является понятие базиса. Введем определения.
Определение 1 . Пара векторов называется упорядоченной, если указано, какой вектор этой пары считается первым, а какой вторым.
Определение 2.
Упорядоченная
пара ,
, неколлинеарных векторов называется
базисом на плоскости, определяемой
заданными векторами.
неколлинеарных векторов называется
базисом на плоскости, определяемой
заданными векторами.
Теорема 1
. Всякий вектор на плоскости может быть представлен
как линейная комбинация базисной системы
векторов
на плоскости может быть представлен
как линейная комбинация базисной системы
векторов ,
, :
:
 (2.12)
(2.12)
и это представление единственно.
Доказательство
. Пусть
векторы и
и образуют базис. Тогда любой вектор
образуют базис. Тогда любой вектор можно представить в виде
можно представить в виде .
.
Для доказательства единственности
предположим, что имеется еще одно
разложение
 .
Имеем тогда=0,
причем хотя бы одна из разностей отлична
от нуля. Последнее означает, что векторы
.
Имеем тогда=0,
причем хотя бы одна из разностей отлична
от нуля. Последнее означает, что векторы и
и линейно зависимы, то есть коллинеарны;
это противоречит утверждению, что они
образуют базис.
линейно зависимы, то есть коллинеарны;
это противоречит утверждению, что они
образуют базис.
Но тогда – разложение единственно.
Определение 3 . Тройка векторов называется упорядоченной, если указано, какой вектор ее считается первым, какой вторым, а какой третьим.
Определение 4 . Упорядоченная тройка некомпланарных векторов называется базисом в пространстве.
Здесь также справедлива теорема разложения и единственности.
Теорема 2
. Любой вектор может быть представлен как линейная
комбинация базисной системы векторов
может быть представлен как линейная
комбинация базисной системы векторов ,
, ,
, :
:
 (2.13)
(2.13)
и это представление единственно (опустим доказательство теоремы).
В разложениях (2.12) и (2.13) величины
 называются координатами вектора
называются координатами вектора в заданном базисе (точнее, аффинными
координатами).
в заданном базисе (точнее, аффинными
координатами).
При фиксированном базисе
 и
и можно писать
можно писать .
.
Например, если задан базис
 и дано, что
и дано, что ,
то это означает, что имеет место
представление (разложение)
,
то это означает, что имеет место
представление (разложение) .
.
4 0 . Линейные операции над векторами в координатной форме . Введение базиса позволяет линейные операции над векторами заменить обычными линейными операциями над числами – координатами этих векторов.
Пусть задан некоторый базис
 .
Очевидно, задание координат вектора в
этом базисе полностью определяет сам
вектор. Имеют место следующие предложения:
.
Очевидно, задание координат вектора в
этом базисе полностью определяет сам
вектор. Имеют место следующие предложения:
а) два вектора
 и
и равны тогда и только тогда, когда равны
их соответственные координаты:
равны тогда и только тогда, когда равны
их соответственные координаты:
б) при умножении вектора
 на число
на число его координаты умножаются на это число:
его координаты умножаются на это число:
 ;
(2.15)
;
(2.15)
в) при сложении векторов складываются их соответственные координаты:
Доказательства этих свойств опустим; докажем лишь для примера свойство б). Имеем
 ==
==
Замечание . В пространстве (на плоскости) можно выбрать бесконечно много базисов.
Приведем пример перехода от одного базиса к другому, установим соотношения между координатами вектора в различных базисах.
Пример 1
. В базисной системе заданы три вектора:
заданы три вектора: ,
, и
и .
В базисе
.
В базисе ,
, ,
, вектор
вектор имеет разложение.
Найти координаты вектора
имеет разложение.
Найти координаты вектора в базисе
в базисе .
.
Решение
. Имеем разложения: ,
, ,
, ;
следовательно,
;
следовательно, =
= +2
+2 +
+ =
=
=
= ,
то есть
,
то есть в базисе
в базисе .
.
Пример 2
. Пусть в некотором
базисе четыре вектора заданы своими координатами:
четыре вектора заданы своими координатами: ,
, ,
, и
и .
.
Выяснить,
образуют ли векторы
 базис; в случае положительного ответа
найти разложение вектора
базис; в случае положительного ответа
найти разложение вектора в этом базисе.
в этом базисе.
Решение
. 1) векторы образуют
базис, если они линейно независимы.
Составим линейную комбинацию векторов (
( )
и выясним, при каких
)
и выясним, при каких и
и она обращается в нуль:
она обращается в нуль: =0.
Имеем:
=0.
Имеем:
 =
= +
+ +
+ =
=
По определению
равенства векторов в координатной форме
получим следующую систему (линейных
однородных алгебраических) уравнений:
 ;
; ;
; ,
определитель которой
,
определитель которой =1
=1 ,
то есть система имеет (лишь) тривиальное
решение
,
то есть система имеет (лишь) тривиальное
решение .
Это означает линейную независимость
векторов
.
Это означает линейную независимость
векторов и, следовательно, они образуют базис.
и, следовательно, они образуют базис.
2) разложим вектор
 в этом базисе. Имеем:
в этом базисе. Имеем: =
= или в координатной форме.
или в координатной форме.
Переходя к
равенству векторов в координатной
форме, получим систему линейных
неоднородных алгебраических уравнений:
 ;
; ;
; .
Решая ее (например, по правилу Крамера),
получим:
.
Решая ее (например, по правилу Крамера),
получим: ,
, ,
, и (
и ( )
) .
Имеем разложение вектора
.
Имеем разложение вектора в базисе
в базисе :
: =.
=.
5
0
. Проекция
вектора на ось. Свойства проекций.
Пусть
имеется некоторая осьl
,
то есть прямая с выбранным на ней
направлением и пусть задан некоторый
вектор .Определим
понятие проекции вектора
.Определим
понятие проекции вектора на осьl
.
на осьl
.
Определение
. Проекцией
вектора на осьl
называется
произведение модуля этого вектора на
косинус угла между осьюl
и вектором (рис.2.10):
на осьl
называется
произведение модуля этого вектора на
косинус угла между осьюl
и вектором (рис.2.10):
 .
(2.17)
.
(2.17)
Следствием этого определения является утверждение о том, что равные векторы имеют равные проекции (на одну и ту же ось).
Отметим свойства проекций.
1) проекция суммы векторов на некоторую ось l равна сумме проекций слагаемых векторов на ту же ось:
2) проекция произведения скаляра на вектор равна произведению этого скаляра на проекцию вектора на ту же ось:
 =
= .
(2.19)
.
(2.19)
Следствие . Проекция линейной комбинации векторов на ось равна линейной комбинации их проекций:
Доказательства свойств опустим.
6
0
. Прямоугольная
декартова система координат в пространстве
.Разложение вектора по ортам осей.
Пусть в качестве базиса выбраны три
взаимно перпендикулярных орта; для них
вводим специальные обозначения .
Поместив их начала в точкуO
,
направим по ним (в соответствии с ортами
.
Поместив их начала в точкуO
,
направим по ним (в соответствии с ортами )
координатные осиOx
,Oy
иOz
(ось с выбранным на ней положительным
направлением, началом отсчета и единицей
длины называется координатной осью).
)
координатные осиOx
,Oy
иOz
(ось с выбранным на ней положительным
направлением, началом отсчета и единицей
длины называется координатной осью).
Определение . Упорядоченная система трех взаимно перпендикулярных координатных осей с общим началом и общей единицей длины называется прямоугольной декартовой системой координат в пространстве.
Ось Ox называется осью абсцисс,Oy – осью ординат иOz – осью аппликат.
Займемся
разложением произвольного вектора по
базису
 .
Из теоремы (см.§2.2,п.3 0 , (2.13)) следует,
что
.
Из теоремы (см.§2.2,п.3 0 , (2.13)) следует,
что может быть и единственным образом
разложен по базису
может быть и единственным образом
разложен по базису (здесь вместо обозначения координат
(здесь вместо обозначения координат употребляют
употребляют ):
):
 .
(2.21)
.
(2.21)
В (2.21)
 суть (декартовы прямоугольные) координаты
вектора
суть (декартовы прямоугольные) координаты
вектора .
Смысл декартовых координат устанавливает
следующая теорема.
.
Смысл декартовых координат устанавливает
следующая теорема.
Теорема
. Декартовы
прямоугольные координаты вектора
вектора являются проекциями этого вектора
соответственно на осиOx
,Oy
иOz
.
являются проекциями этого вектора
соответственно на осиOx
,Oy
иOz
.
Доказательство.
Поместим
вектор в начало системы координат – точкуO
.
Тогда его конец будет совпадать с
некоторой точкой
в начало системы координат – точкуO
.
Тогда его конец будет совпадать с
некоторой точкой .
.
Проведем через
точку
 три плоскости, параллельные координатным
плоскостямOyz
,Oxz
иOxy
(рис.2.11 хх). Получим
тогда:
три плоскости, параллельные координатным
плоскостямOyz
,Oxz
иOxy
(рис.2.11 хх). Получим
тогда:
 .
(2.22)
.
(2.22)
В (2.22) векторы
 и
и
 называются составляющими вектора
называются составляющими вектора по осямOx
,Oy
иOz
.
по осямOx
,Oy
иOz
.
Пусть через
 и
и обозначены соответственно углы,
образованные вектором
обозначены соответственно углы,
образованные вектором с ортами
с ортами .
Тогда для составляющих получим следующие
формулы:
.
Тогда для составляющих получим следующие
формулы:
 =
=
 =
= ,
,
 =
=
 =
= ,
,
 =
=
 =
= (2.23)
(2.23)
Из (2.21), (2.22) (2.23) находим:
 =
= =
= ;
; =
= =
= ;
; =
= =
= (2.23)
(2.23)
– координаты
 вектора
вектора есть проекции этого вектора на координатные
осиOx
,Oy
иOz
соответственно.
есть проекции этого вектора на координатные
осиOx
,Oy
иOz
соответственно.
Замечание
. Числа называются направляющими косинусами
вектора
называются направляющими косинусами
вектора .
.
Модуль вектора
 (диагональ прямоугольного параллелепипеда)
вычисляется по формуле:
(диагональ прямоугольного параллелепипеда)
вычисляется по формуле:
 .
(2.24)
.
(2.24)
Из формул (2.23) и (2.24) следует, что направляющие косинусы могут быть вычислены по формулам:
 =
= ;
; =
= ;
; =
= .
(2.25)
.
(2.25)
Возводя обе части каждого из равенств в (2.25) и складывая почленно левые и правые части полученных равенств, придем к формуле:
– не любые три угла образуют некоторое направление в пространстве, но лишь те, косинусы которых связаны соотношением (2.26).
7 0 . Радиус-вектор и координаты точки .Определение вектора по его началу и концу . Введем определение.
Определение
. Радиусом-вектором
(обозначается )
называется вектор, соединяющий начало
координатO
с этой
точкой (рис.2.12 хх):
)
называется вектор, соединяющий начало
координатO
с этой
точкой (рис.2.12 хх):
 .
(2.27)
.
(2.27)
Любой точке пространства соответствует определенный радиус-вектор (и обратно). Таким образом, точки пространства представляются в векторной алгебре их радиус-векторами.
Очевидно, координаты
 точкиM
являются
проекциями ее радиус-вектора
точкиM
являются
проекциями ее радиус-вектора на координатные оси:
на координатные оси:
 (2.28’)
(2.28’)
и, таким образом,
 (2.28)
(2.28)
– радиус-вектор точки есть
вектор, проекции которого на оси координат
равны координатам этой точки. Отсюда
следует две записи:
 и
и .
.
Получим формулы для вычисления
проекций вектора
 по координатам его начала – точке
по координатам его начала – точке и конца – точке
и конца – точке .
.
Проведем радиус-векторы
 и вектор
и вектор (рис.2.13). Получим, что
(рис.2.13). Получим, что
 =
= =(2.29)
=(2.29)
– проекции вектора на координатные орты равны разностям соответствующих координат конца и начала вектора.
8 0 . Некоторые задачи на декартовы координаты .
1)
условия коллинеарности
векторов
. Из теоремы (см.§2.1,п.2 0 ,
формула (2.7)) следует, что для коллинеарности
векторов и
и необходимо и достаточно, чтобы выполнялось
соотношение:
необходимо и достаточно, чтобы выполнялось
соотношение: =
=
 .
Из этого векторного равенства получаем
три в координатной форме равенства:,
откуда следует условие коллинеарности
векторов в координатной форме:
.
Из этого векторного равенства получаем
три в координатной форме равенства:,
откуда следует условие коллинеарности
векторов в координатной форме:
 (2.30)
(2.30)
– для коллинеарности векторов
 и
и необходимо и достаточно, чтобы их
соответствующие координаты были
пропорциональны.
необходимо и достаточно, чтобы их
соответствующие координаты были
пропорциональны.
2)
расстояние между
точками
. Из представления (2.29)
следует, что расстояние между точками
между точками и
и определяется формулой
определяется формулой
 =
= =.
(2.31)
=.
(2.31)
3)
деление отрезка в
данном отношении
. Пусть даны точки и
и и отношение
и отношение .
Нужно найти
.
Нужно найти – координаты точкиM
(рис.2.14).
– координаты точкиM
(рис.2.14).
Имеем из условия коллинеарности
векторов:
 ,
откуда
,
откуда и
и
 .
(2.32)
.
(2.32)
Из (2.32) получим в координатной форме:
Из формул (2.32’) можно получить
формулы для вычисления координат
середины отрезка
 ,
полагая
,
полагая :
:
Замечание
. Будем считать
отрезки и
и положительными или отрицательными в
зависимости от того, совпадает их
направление с направлением от начала
положительными или отрицательными в
зависимости от того, совпадает их
направление с направлением от начала отрезка к концу
отрезка к концу ,
или не совпадает. Тогда по формулам
(2.32) – (2.32”) можно находить координат
точки, делящей отрезок
,
или не совпадает. Тогда по формулам
(2.32) – (2.32”) можно находить координат
точки, делящей отрезок внешним образом, то есть так, что делящая
точкаM
находится на
продолжении отрезка
внешним образом, то есть так, что делящая
точкаM
находится на
продолжении отрезка ,
а не внутри его. При этом конечно,
,
а не внутри его. При этом конечно, .
.
4)
уравнение сферической
поверхности
.
Составим уравнение
сферической поверхности – геометрического
места точек ,
равноудаленных на расстояние
,
равноудаленных на расстояние от некоторого фиксированного центра –
точки
от некоторого фиксированного центра –
точки .
Очевидно, что в данном случае
.
Очевидно, что в данном случае и с учетом формулы (2.31)
и с учетом формулы (2.31)
Уравнение (2.33) и есть уравнение искомой сферической поверхности.
Введенные нами линейные операции над векторами дают возможность составлять различные выражения для векторных величин и преобразовывать их при помощи установленных для этих операций свойств.
Исходя из заданного набора векторов а 1 , ..., а n , можно составить выражение вида
где а 1 , ..., а n - произвольные действительные числа. Это выражение называют линейной комбинацией векторов а 1 , ..., а n . Числа α i , i = 1, n , представляют собой коэффициенты линейной комбинации . Набор векторов называют еще системой векторов .
В связи с введенным понятием линейной комбинации векторов возникает задача описания множества векторов, которые могут быть записаны в виде линейной комбинации данной системы векторов а 1 , ..., а n . Кроме того, закономерны вопросы об условиях, при которых существует представление вектора в виде линейной комбинации, и о единственности такого представления.
Определение 2.1. Векторы а 1 , ..., а n называют линейно зависимыми , если существует такой набор коэффициентов α 1 , ... , α n , что
α 1 a 1 + ... + α n а n = 0 (2.2)
и при этом хотя бы один из этих коэффициентов ненулевой. Если указанного набора коэффициентов не существует, то векторы называют линейно независимыми .
Если α 1 = ... = α n = 0, то, очевидно, α 1 а 1 + ... + α n а n = 0. Имея это в виду, можем сказать так: векторы а 1 , ..., а n линейно независимы, если из равенства (2.2) вытекает, что все коэффициенты α 1 , ... , α n равны нулю.
Следующая теорема поясняет, почему новое понятие названо термином "зависимость" (или "независимость"), и дает простой критерий линейной зависимости.
Теорема 2.1. Для того чтобы векторы а 1 , ..., а n , n > 1, были линейно зависимы, необходимо и достаточно, чтобы один из них являлся линейной комбинацией остальных.
◄ Необходимость. Предположим, что векторы а 1 , ..., а n линейно зависимы. Согласно определению 2.1 линейной зависимости, в равенстве (2.2) слева есть хотя бы один ненулевой коэффициент, например α 1 . Оставив первое слагаемое в левой части равенства, перенесем остальные в правую часть, меняя, как обычно, у них знаки. Разделив полученное равенство на α 1 , получим
a 1 =-α 2 /α 1 ⋅ a 2 - ... - α n /α 1 ⋅ a n
т.е. представление вектора a 1 в виде линейной комбинации остальных векторов а 2 , ..., а n .
Достаточность. Пусть, например, первый вектор а 1 можно представить в виде линейной комбинации остальных векторов: а 1 = β 2 а 2 + ... + β n а n . Перенеся все слагаемые из правой части в левую, получим а 1 - β 2 а 2 - ... - β n а n = 0, т.е. линейную комбинацию векторов а 1 , ..., а n с коэффициентами α 1 = 1, α 2 = - β 2 , ..., α n = - β n , равную нулевому вектору. В этой линейной комбинации не все коэффициенты равны нулю. Согласно определению 2.1, векторы а 1 , ..., а n линейно зависимы.
Определение и критерий линейной зависимости сформулированы так, что подразумевают наличие двух или более векторов. Однако можно также говорить о линейной зависимости одного вектора. Чтобы реализовать такую возможность, нужно вместо "векторы линейно зависимы" говорить "система векторов линейно зависима". Нетрудно убедиться, что выражение "система из одного вектора линейно зависима" означает, что этот единственный вектор является нулевым (в линейной комбинации имеется только один коэффициент, и он не должен равняться нулю).
Понятие линейной зависимости имеет простую геометрическую интерпретацию. Эту ин-терпретацию проясняют следующие три утверждения.
Теорема 2.2. Два вектора линейно зависимы тогда и только тогда, когда они коллинеарны.
◄ Если векторы а и b линейно зависимы, то один из них, например а, выражается через другой, т.е. а = λb для некоторого действительного числа λ. Согласно определению 1.7 произведения вектора на число, векторы а и b являются коллинеарными.
Пусть теперь векторы а и b коллинеарны. Если они оба нулевые, то очевидно, что они линейно зависимы, так как любая их линейная комбинация равна нулевому вектору. Пусть один из этих векторов не равен 0, например вектор b. Обозначим через λ отношение длин векторов: λ = |а|/|b|. Коллинеарные векторы могут быть однонаправленными или противоположно направленными . В последнем случае у λ изменим знак. Тогда, проверяя определение 1.7, убеждаемся, что а = λb. Согласно теореме 2.1, векторы а и b линейно зависимы.
Замечание 2.1. В случае двух векторов, учитывая критерий линейной зависимости, доказанную теорему можно переформулировать так: два вектора коллинеарны тогда и только тогда, когда один из них представляется как произведение другого на число. Это является удобным критерием коллинеарности двух векторов.
Теорема 2.3. Три вектора линейно зависимы тогда и только тогда, когда они компланарны .
◄ Если три вектора а, Ь, с линейно зависимы, то, согласно теореме 2.1, один из них, например а, является линейной комбинацией остальных: а = βb + γс. Совместим начала векторов b и с в точке A. Тогда векторы βb, γс будут иметь общее начало в точке A и по правилу параллелограмма их сумма, т.е. вектор а, будет представлять собой вектор с началом A и концом , являющимся вершиной параллелограмма, построенного на векторах-слагаемых. Таким образом, все векторы лежат в одной плоскости, т. е. компланарны.
Пусть векторы а, b, с компланарны. Если один из этих векторов является нулевым, то очевидно, что он будет линейной комбинацией остальных. Достаточно все коэффициенты линейной комбинации взять равными нулю. Поэтому можно считать, что все три вектора не являются нулевыми. Совместим начала этих векторов в общей точке O. Пусть их концами будут соот-ветственно точки A, B, C (рис. 2.1). Через точку C проведем прямые, параллельные прямым, проходящим через пары точек O, A и O, B. Обозначив точки пересечения через A" и B", получим параллелограмм OA"CB", следовательно, OC" = OA" + OB" . Вектор OA" и ненулевой вектор а= OA коллинеарны, а потому первый из них может быть получен умножением второго на действительное число α:OA" = αOA . Аналогично OB" = βOB , β ∈ R. В результате получаем,что OC" = α OA + βOB , т.е. вектор с является линейной комбинацией векторов а и b. Согласно теореме 2.1, векторы a, b, с являются линейно зависимыми.

Теорема 2.4. Любые четыре вектора линейно зависимы.
◄ Доказательство проводим по той же схеме, что и в теореме 2.3. Рассмотрим произвольные четыре вектора a, b, с и d. Если один из четырех векторов является нулевым, либо среди них есть два коллинеарных вектора, либо три из четырех векторов компланарны, то эти четыре вектора линейно зависимы. Например, если векторы а и b коллинеарны, то мы можем составить их линейную комбинацию αa + βb = 0 с ненулевыми коэффициентами, а затем в эту комбинацию добавить оставшиеся два вектора, взяв в качестве коэффициентов нули. Получим равную 0 линейную комбинацию четырех векторов, в которой есть ненулевые коэффициенты.
Таким образом, мы можем считать, что среди выбранных четырех векторов нет нулевых, никакие два не коллинеарны и никакие три не являются компланарными. Выберем в качестве их общего начала точку О. Тогда концами векторов a, b, с, d будут некоторые точки A, B, С, D (рис. 2.2). Через точку D проведем три плоскости, параллельные плоскостям ОВС, OCA, OAB, и пусть A", B", С" - точки пересечения этих плоскостей с прямыми OA, OB, ОС соответственно. Мы получаем параллелепипед OA"C"B"C"B"DA", и векторы a, b, с лежат на его ребрах, выходящих из вершины О. Так как четырехугольник OC"DC" является параллелограммом, то OD = OC" + OC" . В свою очередь, отрезок ОС" является диагональю параллелограмма OA"C"B", так что OC" = OA" + OB" , а OD = OA" + OB" + OC" .
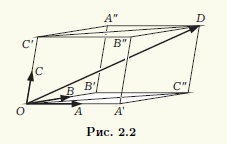
Остается заметить, что пары векторов OA ≠ 0 и OA" , OB ≠ 0 и OB" , OC ≠ 0 и OC" коллинеарны, и, следовательно, можно подобрать коэффициенты α, β, γ так, что OA" = αOA , OB" = βOB и OC" = γOC . Окончательно получаем OD = αOA + βOB + γOC . Следовательно, вектор OD выражается через остальные три вектора, а все четыре вектора, согласно теореме 2.1, линейно зависимы.
Задача 1. Выяснить, является ли система векторов линейно независимой. Систему векторов будем задавать матрицей системы, столбцы которой состоят из координат векторов.
 .
.
Решение.
Пусть линейная комбинация  равна нулю. Записав это равенство в координатах, получим следующую систему уравнений:
равна нулю. Записав это равенство в координатах, получим следующую систему уравнений:
 .
.
Такая система уравнений называется треугольной. Она имеет единственное решение  . Следовательно, векторы
. Следовательно, векторы  линейно независимы.
линейно независимы.
Задача 2. Выяснить, является ли линейно независимой система векторов.
 .
.
Решение.
Векторы  линейно независимы (см. задачу 1). Докажем, что вектор является линейной комбинацией векторов
линейно независимы (см. задачу 1). Докажем, что вектор является линейной комбинацией векторов  . Коэффициенты разложения по векторам
. Коэффициенты разложения по векторам  определяются из системы уравнений
определяются из системы уравнений
 .
.
Эта система, как треугольная, имеет единственное решение.
Следовательно, система векторов  линейно зависима.
линейно зависима.
Замечание . Матрицы, такого вида, как в задаче 1, называются треугольными , а в задаче 2 – ступенчато-треугольными . Вопрос о линейной зависимости системы векторов легко решается, если матрица, составленная из координат этих векторов, является ступенчато треугольной. Если матрица не имеет специального вида, то с помощью элементарных преобразований строк , сохраняющих линейные соотношения между столбцами, её можно привести к ступенчато-треугольному виду.
Элементарными преобразованиями строк матрицы(ЭПС) называются следующие операции над матрицей:
1) перестановка строк;
2) умножение строки на отличное от нуля число;
3) прибавление к строке другой строки, умноженной на произвольное число.
Задача 3. Найти максимальную линейно независимую подсистему и вычислить ранг системы векторов
 .
.
Решение. Приведем матрицу системы с помощью ЭПС к ступенчато-треугольному виду. Чтобы объяснить порядок действий, строчку с номером преобразуемой матрицы обозначим символом . В столбце после стрелки указаны действия над строками преобразуемой матрицы, которые надо выполнить для получения строк новой матрицы.

 .
.
Очевидно, что первые два столбца полученной матрицы линейно независимы, третий столбец является их линейной комбинацией, а четвертый не зависит от двух первых. Векторы  называются базисными. Они образуют максимальную линейно независимую подсистему системы , а ранг системы равен трем.
называются базисными. Они образуют максимальную линейно независимую подсистему системы , а ранг системы равен трем.
Базис, координаты
Задача 4.
Найти базис и координаты векторов в этом базисе на множестве геометрических векторов, координаты которых удовлетворяют условию  .
.
Решение . Множество является плоскостью, проходящей через начало координат. Произвольный базис на плоскости состоит из двух неколлинеарных векторов. Координаты векторов в выбранном базисе определяются решением соответствующей системы линейных уравнений.
Существует и другой способ решения этой задачи, когда найти базис можно по координатам.
Координаты  пространства не являются координатами на плоскости , так как они связаны соотношением
пространства не являются координатами на плоскости , так как они связаны соотношением  , то есть не являются независимыми. Независимые переменные и (они называются свободными) однозначно определяют вектор на плоскости и, следовательно, они могут быть выбраны координатами в . Тогда базис
, то есть не являются независимыми. Независимые переменные и (они называются свободными) однозначно определяют вектор на плоскости и, следовательно, они могут быть выбраны координатами в . Тогда базис  состоит из векторов, лежащих в и соответствующих наборам свободных переменных
состоит из векторов, лежащих в и соответствующих наборам свободных переменных  и
и  , то есть .
, то есть .
Задача 5. Найти базис и координаты векторов в этом базисе на множестве всех векторов пространства , у которых нечетные координаты равны между собой.
Решение . Выберем, как и в предыдущей задаче, координаты в пространстве .
Так как  , то свободные переменные
, то свободные переменные  однозначно определяют вектор из и, следовательно, являются координатами. Соответствующий базис состоит из векторов .
однозначно определяют вектор из и, следовательно, являются координатами. Соответствующий базис состоит из векторов .
Задача 6.
Найти базис и координаты векторов в этом базисе на множестве всех матриц вида  , где
, где  – произвольные числа.
– произвольные числа.
Решение . Каждая матрица из однозначно представима в виде:
Это соотношение является разложением вектора из по базису  с координатами
с координатами  .
.
Задача 7. Найти размерность и базис линейной оболочки системы векторов
 .
.
Решение. Преобразуем с помощью ЭПС матрицу из координат векторов системы к ступенчато-треугольному виду.


 .
.
Столбцы  последней матрицы линейно независимы, а столбцы
последней матрицы линейно независимы, а столбцы  линейно выражаются через них. Следовательно, векторы
линейно выражаются через них. Следовательно, векторы  образуют базис
образуют базис  , и
, и  .
.
Замечание
. Базис в выбирается неоднозначно. Например, векторы  также образуют базис
также образуют базис  .
.
Определение. Линейной комбинацией векторов a 1 , ..., a n с коэффициентами x 1 , ..., x n называется вектор
x 1 a 1 + ... + x n a n .
тривиальной , если все коэффициенты x 1 , ..., x n равны нулю.
Определение. Линейная комбинация x 1 a 1 + ... + x n a n называется нетривиальной , если хотябы один из коэффициентов x 1 , ..., x n не равен нулю.
линейно независимыми , если не существует нетривиальной комбинации этих векторов равной нулевому вектору .
Тоесть вектора a 1 , ..., a n линейно независимы если x 1 a 1 + ... + x n a n = 0 тогда и только тогда, когда x 1 = 0, ..., x n = 0.
Определение. Вектора a 1 , ..., a n называются линейно зависимыми , если существует нетривиальная комбинация этих векторов равная нулевому вектору .
Свойства линейно зависимых векторов:
Для n -мерных векторов.
n + 1 вектор всегда линейно зависимы.
Для 2-х и 3-х мерных векторов.
Два линейно зависимые вектора - коллинеарные. (Коллинеарные вектора - линейно зависимы.) .
Для 3-х мерных векторов.
Три линейно зависимые вектора - компланарные. (Три компланарные вектора - линейно зависимы.)
Примеры задач на линейную зависимость и линейную независимость векторов:
Пример 1. Проверить будут ли вектора a = {3; 4; 5}, b = {-3; 0; 5}, c = {4; 4; 4}, d = {3; 4; 0} линейно независимыми.
Решение:
Вектора будут линейно зависимыми, так как размерность векторов меньше количества векторов.
Пример 2. Проверить будут ли вектора a = {1; 1; 1}, b = {1; 2; 0}, c = {0; -1; 1} линейно независимыми.
Решение:
| x 1 + x 2 = 0 | |
| x 1 + 2x 2 - x 3 = 0 | |
| x 1 + x 3 = 0 |
| 1 | 1 | 0 | 0 | ~ | ||
| 1 | 2 | -1 | 0 | |||
| 1 | 0 | 1 | 0 |
| ~ | 1 | 1 | 0 | 0 | ~ | 1 | 1 | 0 | 0 | ~ | ||||
| 1 - 1 | 2 - 1 | -1 - 0 | 0 - 0 | 0 | 1 | -1 | 0 | |||||||
| 1 - 1 | 0 - 1 | 1 - 0 | 0 - 0 | 0 | -1 | 1 | 0 |
из первой строки вычтем вторую; к третей строке добавим вторую:
| ~ | 1 - 0 | 1 - 1 | 0 - (-1) | 0 - 0 | ~ | 1 | 0 | 1 | 0 | ||||
| 0 | 1 | -1 | 0 | 0 | 1 | -1 | 0 | ||||||
| 0 + 0 | -1 + 1 | 1 + (-1) | 0 + 0 | 0 | 0 | 0 | 0 |
Данное решение показывает, что система имеет множество решений, то есть существует не нулевая комбинация значений чисел x 1 , x 2 , x 3 таких, что линейная комбинация векторов a , b , c равна нулевому вектору, например:
A + b + c = 0
а это значит вектора a , b , c линейно зависимы.
Ответ: вектора a , b , c линейно зависимы.
Пример 3. Проверить будут ли вектора a = {1; 1; 1}, b = {1; 2; 0}, c = {0; -1; 2} линейно независимыми.
Решение: Найдем значения коэффициентов при котором линейная комбинация этих векторов будет равна нулевому вектору.
x 1 a + x 2 b + x 3 c 1 = 0Это векторное уравнение можно записать в виде системы линейных уравнений
| x 1 + x 2 = 0 | |
| x 1 + 2x 2 - x 3 = 0 | |
| x 1 + 2x 3 = 0 |
Решим эту систему используя метод Гаусса
| 1 | 1 | 0 | 0 | ~ | ||
| 1 | 2 | -1 | 0 | |||
| 1 | 0 | 2 | 0 |
из второй строки вычтем первую; из третей строки вычтем первую:
| ~ | 1 | 1 | 0 | 0 | ~ | 1 | 1 | 0 | 0 | ~ | ||||
| 1 - 1 | 2 - 1 | -1 - 0 | 0 - 0 | 0 | 1 | -1 | 0 | |||||||
| 1 - 1 | 0 - 1 | 2 - 0 | 0 - 0 | 0 | -1 | 2 | 0 |
из первой строки вычтем вторую; к третей строке добавим вторую.
Пусть L – линейное пространство над полем Р . Пусть А1, а2, … , аn (*) конечная система векторов из L . Вектор В = a1×А1 + a2×А2 + … + an×Аn (16) называется Линейной комбинацией векторов ( *), или говорят, что вектор В линейно выражается через систему векторов (*).
Определение 14. Система векторов (*) называется Линейно зависимой , тогда и только тогда, когда существует такой ненулевой набор коэффициентов a1, a2, … , an, что a1×А1 + a2×А2 + … + an×Аn = 0. Если же a1×А1 + a2×А2 + … + an×Аn = 0 Û a1 = a2 = … = an = 0, то система (*) называется Линейно независимой.
Свойства линейной зависимости и независимости.
10. Если система векторов содержит нулевой вектор, то она линейно зависима.
Действительно, если в системе (*) вектор А1 = 0, То 1×0 + 0×А2 + … + 0 ×Аn = 0 .
20. Если система векторов содержит два пропорциональных вектора, то она линейно зависима.
Пусть А1 = L ×а2. Тогда 1×А1 –l×А2 + 0×А3 + … + 0×А N = 0.
30. Конечная система векторов (*) при n ³ 2 линейно зависима тогда и только тогда, когда хотя бы один из её векторов является линейной комбинацией остальных векторов этой системы.
Þ Пусть (*) линейно зависима. Тогда найдётся ненулевой набор коэффициентов a1, a2, … , an, при котором a1×А1 + a2×А2 + … + an×Аn = 0 . Не нарушая общности, можно считать, что a1 ¹ 0. Тогда существует и А1 = ×a2×А2 + … + ×an×А N. Итак, вектор А1 является линейной комбинацией остальных векторов.
Ü Пусть один из векторов (*) является линейной комбинацией остальных. Можно считать, что это первый вектор, т. е. А1 = B2А2 + … + bnА N, Отсюда (–1)×А1 + b2А2 + … + bnА N = 0 , т. е. (*) линейно зависима.
Замечание. Используя последнее свойство, можно дать определение линейной зависимости и независимости бесконечной системы векторов.
Определение 15. Система векторов А1, а2, … , аn , … (**) называется Линейно зависимой, Если хотя бы один её вектор является линейной комбинацией некоторого конечного числа остальных векторов. В противном случае система (**) называется Линейно независимой.
40. Конечная система векторов линейно независима тогда и только тогда, когда ни один из её векторов нельзя линейно выразить через остальные её векторы.
50. Если система векторов линейно независима, то любая её подсистема тоже линейно независима.
60. Если некоторая подсистема данной системы векторов линейно зависима, то и вся система тоже линейно зависима.
Пусть даны две системы векторов А1, а2, … , аn , … (16) и В1, в2, … , вs, … (17). Если каждый вектор системы (16) можно представить в виде линейной комбинации конечного числа векторов системы (17), то говорят, что система (17) линейно выражается через систему (16).
Определение 16. Две системы векторов называются Эквивалентными , если каждая из них линейно выражается через другую.
Теорема 9 (основная теорема о линейной зависимости).
Пусть и – две конечные системы векторов из L . Если первая система линейно независима и линейно выражается через вторую, то N £ s.
Доказательство. Предположим, что N > S. По условию теоремы
|
|
Так как система линейно независима, то равенство (18) Û Х1=х2=…=х N= 0. Подставим сюда выражения векторов : …+=0 (19). Отсюда (20). Условия (18), (19) и (20), очевидно, эквивалентны. Но (18) выполняется только при Х1=х2=…=х N= 0. Найдём, когда верно равенство (20). Если все его коэффициенты равны нулю, то оно, очевидно, верно. Приравняв их нулю, получим систему (21). Так как эта система имеет нулевое , то она |

 (21)
(21)совместна. Так как число уравнений больше числа неизвестных, то система имеет бесконечно много решений. Следовательно, у неё есть ненулевое Х10, х20, …, х N0 . При этих значениях равенство (18) будет верно, что противоречит тому, что система векторов линейно независима. Итак, наше предположение не верно. Следовательно, N £ s.
Следствие. Если две эквивалентные системы векторов конечны и линейно независимы, то они содержат одинаковое число векторов.
Определение 17. Система векторов называется Максимальной линейно независимой системой векторов Линейного пространства L , если она линейно независима, но при добавлении к ней любого вектора из L , не входящего в эту систему, она становится уже линейно зависимой.
Теорема 10. Любые две конечные максимальные линейно независимые системы векторов из L Содержат одинаковое число векторов.
Доказательство следует из того, что любые две максимальные линейно независимые системы векторов эквивалентны.
Легко доказать, что любую линейно независимую систему векторов пространства L можно дополнить до максимальной линейно независимой системы векторов этого пространства.
Примеры:
1. Во множестве всех коллинеарных геометрических векторов любая система, состоящая их одного ненулевого вектора, является максимальной линейно независимой.
2. Во множестве всех компланарных геометрических векторов любые два неколлинеарных вектора составляют максимальную линейно независимую систему.
3. Во множестве всех возможных геометрических векторов трёхмерного евклидова пространства любая система трёх некомпланарных векторов является максимальной линейно независимой.
4. Во множестве всех многочленов степени не выше N С действительными (комплексными) коэффициентами система многочленов 1, х, х2, … , хn Является максимальной линейно независимой.
5. Во множестве всех многочленов с действительными (комплексными) коэффициентами примерами максимальной линейно независимой системы являются
а) 1, х, х2, … , хn, … ;
б) 1, (1 – х ), (1 – х )2, … , (1 – х )N, …
6. Множество матриц размерности M ´ N является линейным пространством (проверьте это). Примером максимальной линейно независимой системы в этом пространстве является система матриц Е11 = , Е12 =, … , Е Mn = .
Пусть дана система векторов С1, с2, … , ср (*). Подсистема векторов из (*) называется Максимальной линейно независимой Подсистемой Системы ( *) , если она линейно независима, но при добавлении к ней любого другого вектора этой система она становится линейно зависимой. Если система (*) конечна, то любая её максимальная линейно независимая подсистема содержит одно и то же число векторов. (Доказательство проведите самостоятельно). Число векторов в максимальной линейно независимой подсистеме системы (*) называется Рангом Этой системы. Очевидно, эквивалентные системы векторов имеют одинаковые ранги.